SENSOR GYROSCOPE
PENGERTIAN GYROSCOPE
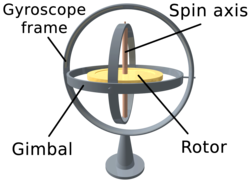
Gyroscope adalah perangkat untuk mengukur atau mempertahankan orientasi, yang berlandaskan pada prinsip-prinsip momentum sudut.Secara mekanis, giroskop berbentuk seperti sebuah roda berputar atau
cakram di mana poros bebas untuk mengambil setiap orientasi. Meskipun
orientasi ini tidak tetap, perubahannya dalam menanggapi torsi
eksternal jauh lebih sedikit dan berlangsung dalam arah yang berbeda
jika dibandingkan dengan tanpa momentum sudut, yang berkaitan dengan
tingginya tingkat putaran dan inersia momen. Orientasi perangkat tetap sama, terlepas dari gerak platform pemasangan, karena pemasangan perangkat pada sebuah gimbal akan meminimalkan torsi eksternal.
PRINSIP KERJA GYROSCOPE
Gyro sensor bisa mendeteksi gerakan sesuai
gravitasi, atau dengan kata lain mendeteksi gerakan pennguna.Gyroscope pada penelitian ini digunakan untuk
mengukur sumbu rotasi roket. Sebelum digunakan, sensor gyroscope terlebih
dahulu dilakukan proses kalibrasi dengan menggunakan bandul. Proses kalibrasi
tersebut berfungsi untuk memperoleh nilai faktor kalibrasi. Gyroscope memiliki
keluaran berupa kecepatan sudut dari arah 3 sumbu yaitu: sumbu x yang nantinya
akan menjadi sudut phi (kana dan kiri) dari sumbu y nantinya menjadi
sudut theta (atas dan bawah), dan sumbu z nantinya menjadi sudut psi
(depan dan belakang). Cara kerja giroskop yang berlandaskan pada prinsip-prinsip operasi lain juga ada, misalnya giroskop MEMS perangkat elektronik yang ditemukan pada perangkat elektronik konsumen, cincin laser, giroskop optik serat, dan giroskop kuantum yang sangat sensitif. Aplikasi giroskop termasuk sistem navigasi inersia mana kompas magnetik
tidak akan bekerja (seperti dalam teleskop Hubble ) atau tidak akan
cukup tepat (seperti dalam ICBM ), atau untuk stabilisasi kendaraan
terbang seperti radio-dikontrol helikopter atau kendaraan udara tak
berawak . Karena presisi tinggi mereka, giroskop juga digunakan untuk
menjaga arah dalam terowongan pertambangan.
Presesi dapat ditunjukkan dengan menempatkan sebuah giroskop berputar
dengan sumbu horizontal dan didukung longgar (gesekan terhadap presesi)
pada salah satu ujungnya. Alih-alih jatuh, seperti yang mungkin
diharapkan, giroskop muncul untuk menentang gravitasi dengan tersisa
dengan sumbu horizontal, ketika ujung sumbu yang tersisa tidak didukung
dan ujung bebas dari sumbu perlahan menggambarkan lingkaran pada bidang
horizontal, yang dihasilkan presesi berputar. Efek ini dijelaskan oleh
persamaan di atas. Torsi pada giroskop dipasok oleh beberapa kekuatan:
gravitasi yang bekerja pada pusat ke bawah perangkat massa, dan gaya
yang sama bertindak atas untuk mendukung salah satu ujung perangkat.
Rotasi dihasilkan dari torsi ini tidak menurun, seperti bisa intuitif
diharapkan, menyebabkan perangkat untuk jatuh, tetapi tegak lurus baik
torsi gravitasi (horizontal dan tegak lurus sumbu rotasi) dan sumbu
rotasi (horizontal dan keluar dari titik support), yaitu, tentang sumbu
vertikal, menyebabkan perangkat untuk memutar perlahan tentang titik
pendukung.
Berdasarkan besarnya torsi konstan τ, kecepatan dari presesi giroskop
Ω P adalah berbanding terbalik dengan L, besarnya momentum sudutnya: di
mana θ adalah sudut antara vektor P dan L Ω. Jadi, jika spin giroskop
melambat (misalnya, akibat gesekan), mengurangi momentum sudutnya
sehingga tingkat kenaikan presesi. Hal ini berlanjut sampai perangkat
tidak dapat untuk memutar cukup cepat untuk mendukung beratnya sendiri,
ketika berhenti precessing dan jatuh dukungan, terutama karena gesekan
terhadap presesi penyebab lain presesi yang masuk menyebabkan jatuh.Dengan konvensi, ketiga vektor - torsi, spin, dan presesi - semua
berorientasi dengan menghormati satu sama lain menurut aturan tangan
kanan .Untuk mudah memastikan arah efek giro, hanya ingat bahwa roda
bergulir cenderung, ketika bersandar ke samping, untuk mengubah ke arah
yang ramping.
VARIASI GYROSCOPE
Girostat
Sebuah girostat adalah varian dari giroskop. Ini terdiri dari roda
flywheel besar tersembunyi dalam casing padat. Perilaku di atas meja,
atau dengan berbagai modus suspensi atau dukungan, berfungsi untuk
menggambarkan pembalikan penasaran hukum biasa kesetimbangan statis
karena perilaku gyrostatic dari roda flywheel interior terlihat ketika
diputar cepat. Yang girostat pertama dirancang oleh Lord Kelvin untuk
menggambarkan keadaan yang lebih rumit dari gerak tubuh yang berputar
ketika bebas untuk berkeliling pada bidang horisontal, seperti gasing
berputar di trotoar, atau lingkaran atau sepeda di jalan.
MEMS
Sebuah MEMS giroskop mengambil ide dari Foucault pendulum dan
menggunakan elemen bergetar, yang dikenal sebagai MEMS (Micro
Electro-Mechanical System). Gyro berbasis MEMS awalnya dibuat praktis
dan producible oleh Systron Donner Inertial (SDI). Hal ini, SDI adalah
produsen besar MEMS giroskop.
FOG
Sebuah giroskop serat optik (FOG) adalah sebuah giroskop yang
menggunakan interferensi cahaya untuk mendeteksi rotasi mekanik. Sensor
adalah kumparan sebanyak 5 km dari serat optik. Pengembangan rendah-rugi
single-mode serat optik pada awal tahun 1970 untuk industri
telekomunikasi memungkinkan pengembangan Sagnac efek gyros serat optik.
VSG atau CVG
Sebuah fiber optic gyroscope (VSG), juga disebut coriolis vibratory
gyroscope (CVG), menggunakan resonator yang terbuat dari paduan logam
yang berbeda. Ini mengambil posisi antara akurasi rendah, rendah-biaya
giroskop MEMS dan akurasi lebih tinggi dan lebih tinggi-biaya FOG.
Parameter akurasi ditingkatkan dengan menggunakan bahan intrinsik rendah
redaman, vacuumization resonator, dan elektronik digital untuk
mengurangi drift bergantung pada temperatur dan ketidakstabilan sinyal
kontrol.
High-Q Wine-Glass Resonators untuk sensor yang tepat seperti HRG atau
CRG didasarkan pada Bryan "efek gelombang inersia". Mereka terbuat dari
tinggi kemurnian kaca kuarsa atau dari single-kristal safir .
DTG
Sebuah dynamically tuned gyroscope (DTG) adalah sebuah rotor
ditangguhkan oleh gabungan universal dengan pivot lentur. Kekakuan
lentur semi independen dari tingkat spin. Namun, inersia dinamis (dari
efek reaksi gyroscopic) dari gimbal menyediakan kekakuan pegas negatif
sebanding dengan kuadrat dari kecepatan putaran (Howe dan Savet, 1964;
Lawrence, 1998). Oleh karena itu, pada kecepatan tertentu, yang disebut
kecepatan tuning, dua momen membatalkan satu sama lain, membebaskan dari
torsi rotor, kondisi yang diperlukan untuk giroskop yang ideal.
London moment
Sebuah London moment giroskop bergantung pada kuantum mekanik
fenomena , dimana berputar superkonduktor menghasilkan medan magnet yang
sumbu garis sama persis dengan sumbu putar dari rotor gyroscopic.
Sebuah magnetometer menentukan orientasi medan yang dihasilkan, yang
interpolasi untuk menentukan sumbu rotasi. Giroskop jenis ini bisa
sangat akurat dan stabil. Sebagai contoh, yang digunakan dalam Gravity
Probe B percobaan mengukur perubahan dalam orientasi sumbu giroskop
berputar untuk lebih dari 0,5 milliarcseconds (1,4 × 10 -7 derajat)
selama satu tahun. Hal ini setara dengan pemisahan sudut lebar rambut
manusia dilihat dari 32 kilometer (20 mil) jauhnya.
 |
| Gyroscope Sensor |
 |
| 3-Axis Digital Gyroscope |
Untuk lebih jelasnya lagi dapat kita lihat video berikut ini
Ini juga ada video penerapan gyroscope yang digunakan pada console game VR( Virtual Reality )
Sumber:
https://id.wikipedia.org/wiki/Giroskop
http://oktriaviani.blogspot.co.id/2012/06/accelerometer-gyroscope_16.html
https://www.youtube.com/user/ScienceOnline
https://www.youtube.com/user/VirtuixOmni


Komentar
Posting Komentar